Minimum Time to Visit Disappearing Nodes
MedPrompt
There is an undirected graph of n nodes. You are given a 2D array edges, where edges[i] = [ui, vi, lengthi] describes an edge between node ui and node vi with a traversal time of lengthi units.
Additionally, you are given an array disappear, where disappear[i] denotes the time when the node i disappears from the graph and you won't be able to visit it.
Note that the graph might be disconnected and might contain multiple edges.
Return the array answer, with answer[i] denoting the minimum units of time required to reach node i from node 0. If node i is unreachable from node 0 then answer[i] is -1.
Example 1:
Input: n = 3, edges = [[0,1,2],[1,2,1],[0,2,4]], disappear = [1,1,5]
Output: [0,-1,4]
Explanation:
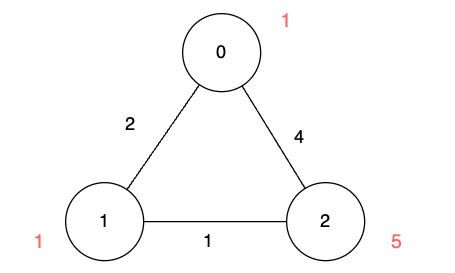
We are starting our journey from node 0, and our goal is to find the minimum time required to reach each node before it disappears.
- For node 0, we don't need any time as it is our starting point.
- For node 1, we need at least 2 units of time to traverse
edges[0]. Unfortunately, it disappears at that moment, so we won't be able to visit it. - For node 2, we need at least 4 units of time to traverse
edges[2].
Example 2:
Input: n = 3, edges = [[0,1,2],[1,2,1],[0,2,4]], disappear = [1,3,5]
Output: [0,2,3]
Explanation:
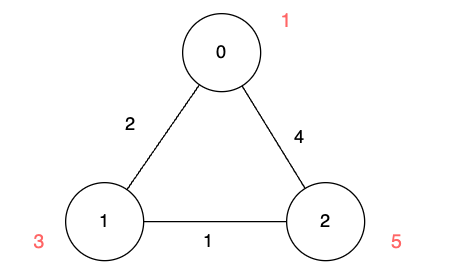
We are starting our journey from node 0, and our goal is to find the minimum time required to reach each node before it disappears.
- For node 0, we don't need any time as it is the starting point.
- For node 1, we need at least 2 units of time to traverse
edges[0]. - For node 2, we need at least 3 units of time to traverse
edges[0]andedges[1].
Example 3:
Input: n = 2, edges = [[0,1,1]], disappear = [1,1]
Output: [0,-1]
Explanation:
Exactly when we reach node 1, it disappears.
Constraints:
1 <= n <= 5 * 1040 <= edges.length <= 105edges[i] == [ui, vi, lengthi]0 <= ui, vi <= n - 11 <= lengthi <= 105disappear.length == n1 <= disappear[i] <= 105
Approaches
2 approaches with complexity analysis and trade-offs.
This approach uses a basic implementation of Dijkstra's algorithm. It finds the shortest path from the source node 0 to all other nodes. The main characteristic of this naive version is how it selects the next node to process. At each step, it performs a linear scan across all nodes to find the unvisited one with the minimum current travel time. The core logic is adapted to handle the disappearance constraint: a path to a node is only considered if the arrival time is strictly less than the node's disappearance time. While correct, this method is inefficient due to the repeated linear scans.
Algorithm
- Graph Representation: Build an adjacency list from the
edgesarray.adj[i]will store a list of pairs, where each pair consists of a neighbor node and the edge weight (time). - Initialization: Create a
minTimearray of sizeninitialized to infinity, representing the shortest time from node 0. SetminTime[0] = 0. Also, create a booleanvisitedarray of the same size, initialized tofalse. - Iterative Search: Loop
ntimes. In each iteration:- Find the unvisited node
uwith the smallestminTimevalue. This requires a linear scan through allnnodes. - If no such node is found (all remaining unvisited nodes have infinite time), it means they are unreachable, so break the loop.
- Mark node
uas visited.
- Find the unvisited node
- Edge Relaxation: For each neighbor
vof the selected nodeu:- Calculate the time to reach
vthroughu:newTime = minTime[u] + weight(u, v). - Constraint Check: This new path is only considered if it's a valid visit (
newTime < disappear[v]) and it's a shorter path (newTime < minTime[v]). - If both conditions are met, update
minTime[v] = newTime.
- Calculate the time to reach
- Finalization: After the loops complete, iterate through the
minTimearray. Any value that is still infinity means the corresponding node is unreachable. Replace these values with-1.
Walkthrough
The algorithm begins by converting the edge list into a more usable adjacency list format. It then initializes a minTime array to keep track of the shortest time to reach each node, with minTime[0] set to 0 and all others to a value representing infinity. The main part of the algorithm is a loop that runs up to n times. In each iteration, it searches for the unvisited node u that is currently closest to the source. Once u is found, it is marked as visited, and we try to "relax" its edges. For each neighbor v of u, we calculate the time it would take to reach v by passing through u. If this new time is less than disappear[v] and also less than the current minTime[v], we update minTime[v]. This process continues until all reachable nodes have been visited. Finally, any node with an infinite minTime is marked as unreachable (-1).
import java.util.*; class Solution { public int[] minimumTime(int n, int[][] edges, int[] disappear) { List<List<int[]>> adj = new ArrayList<>(); for (int i = 0; i < n; i++) { adj.add(new ArrayList<>()); } for (int[] edge : edges) { adj.get(edge[0]).add(new int[]{edge[1], edge[2]}); adj.get(edge[1]).add(new int[]{edge[0], edge[2]}); } int[] minTime = new int[n]; Arrays.fill(minTime, Integer.MAX_VALUE); minTime[0] = 0; boolean[] visited = new boolean[n]; for (int count = 0; count < n; count++) { int u = -1; int t = Integer.MAX_VALUE; // Find the unvisited node with the smallest time for (int i = 0; i < n; i++) { if (!visited[i] && minTime[i] < t) { t = minTime[i]; u = i; } } if (u == -1) { break; // All remaining nodes are unreachable } visited[u] = true; for (int[] edge : adj.get(u)) { int v = edge[0]; int weight = edge[1]; int newTime = t + weight; if (newTime < disappear[v] && newTime < minTime[v]) { minTime[v] = newTime; } } } for (int i = 0; i < n; i++) { if (minTime[i] == Integer.MAX_VALUE) { minTime[i] = -1; } } return minTime; }}Complexity
Time
O(N^2), where N is the number of nodes. The main loop runs N times, and inside it, finding the node with the minimum distance takes O(N) time. The total time for edge relaxations across all iterations is O(E). Thus, the complexity is dominated by the node selection part, resulting in O(N^2 + E), which simplifies to O(N^2) for dense graphs.
Space
O(N + E), where N is the number of nodes and E is the number of edges. This is for storing the adjacency list (`O(N+E)`), the `minTime` array (`O(N)`), and the `visited` array (`O(N)`).
Trade-offs
Pros
Conceptually simpler than the priority queue-based version.
Easy to implement if one is not familiar with heap data structures.
Cons
The time complexity of
O(N^2)is too slow for the given constraints (Nup to 5 * 10^4), and will result in a Time Limit Exceeded error.
Solutions
Solution
class Solution {public int[] minimumTime(int n, int[][] edges, int[] disappear) { List<int[]>[] g = new List[n]; Arrays.setAll(g, k->new ArrayList<>()); for (var e : edges) { int u = e[0], v = e[1], w = e[2]; g[u].add(new int[]{v, w}); g[v].add(new int[]{u, w}); } int[] dist = new int[n]; Arrays.fill(dist, 1 << 30); dist[0] = 0; PriorityQueue<int[]> pq = new PriorityQueue<>((a, b)->a[0] - b[0]); pq.offer(new int[]{0, 0}); while (!pq.isEmpty()) { var e = pq.poll(); int du = e[0], u = e[1]; if (du > dist[u]) { continue; } for (var nxt : g[u]) { int v = nxt[0], w = nxt[1]; if (dist[v] > dist[u] + w && dist[u] + w < disappear[v]) { dist[v] = dist[u] + w; pq.offer(new int[]{dist[v], v}); } } } int[] ans = new int[n]; for (int i = 0; i < n; ++i) { ans[i] = dist[i] < disappear[i] ? dist[i] : -1; } return ans; }}Video walkthrough
Newsletter
One sharp idea, every week
System design and interview prep — short enough to finish.
No spam. Unsubscribe anytime.
Practice
Same difficulty — related problems to reinforce the pattern.